1 中国科学院精密测量科学与技术创新研究院, 湖北 武汉 430071
2 中国科学院原子频标重点实验室, 湖北 武汉 430071
3 中国科学院大学, 北京 100049
镱原子光钟是当前稳定度最好的光钟, 其稳定度已经进入10-19的量级。依托于高精度的镱原子光钟, 可以开展广义相对论的检验以及测地学等领域的科学和应用研究。镱原子光钟研制过程中需要用到多种频率的光, 所以针对这些激光的频率控制是镱原子光钟研制的一项关键技术问题。本文针对钟激光以外其他四种激光的频率控制要求, 以一个四通道超稳光学腔设计作为其频率锁定方案。利用有限元分析方法, 得到了超稳光学腔处于最佳支撑位置处的振动敏感度和温度敏感度。分析结果表明: 在最佳支撑位置处, 光学腔超稳在竖直方向上的振动敏感度为4.010-9/ g, 热时间常数为53 h。对周期为24 h的典型实验环境温度293.15±1 ? K 的条件下, 计算获得的温度敏感度为1.310-4。该四通道超稳光学腔能够同时满足镱原子光钟系统中除钟激光外其他激光的频率稳定度要求。这种简化的四通道超稳腔稳频设计方案, 为今后镱原子光钟的小型化、集成化设计提供一种新技术尝试。
超稳腔 有限元分析 振动分析 热分析 镱原子光钟 ultrastable cavity finite element analysis vibration Analysis thermal Analysis Yb Atom Optical Clock
条纹投影三维测量技术的检测精度依赖于绝对相位与深度关系的标定过程,传统的标定方法步骤复杂、用时较长,在双目测量系统中对左右相机分别标定时尤为明显。因此设计一种基于立体靶标的标定方法,靶标由两个平面组成,各个靶标平面上附着规格已知的图案,平面连接处用特殊图案标识,用于区分左右两面。立体标靶实现双目测量系统相机外部参数与相位-深度的同时标定,将标定时间减少了一半,简化了标定流程; 经过实验验证,利用立体标靶可以精确地进行深度(Z)以及横向(XY)的标定,实测误差小于0.053毫米,方法在双目乃至多节点三维测量系统的标定过程中具有应用价值,增加标定效率同时可避免累计误差产生。
应用光学 立体标靶 条纹投影 三维测量 三维标定 applied optics stereoscopic target fringe projection 3D measurement 3D calibration
圆环编码标志点广泛应用于三维测量领域中,标志点的中心提取精度直接影响了系统的测量精度。针对当前圆环编码标志点中心提取方法易受拍摄角度影响的问题,提出了一种基于编码环带径向直线拟合提取标志点中心的方法。首先对图像进行预处理,提取其边缘,分割出编码标志点环带中的径向直线,然后利用高斯拟合法对边缘点进行亚像素定位。将提取出的亚像素边缘点集映射到参数空间变成曲线,求出所有曲线的交点。最后利用随机采样一致性算法进行拟合,映射到原始坐标空间得到中心坐标。仿真结果表明,随标志点尺寸和拍摄角度的增大,该方法提取的中心坐标误差从1 pixel降低为0.05 pixel。实验测量发现,在标靶尺寸、拍摄角度不同的情况下,该方法提取的中心坐标误差保持1 pixel以内,与椭圆拟合法相比,标定相机的重投影误差减少了20%,标定结果更加精确。
光学检测 编码标志点 中心提取 相机标定 边缘提取 激光与光电子学进展
2020, 57(7): 071203
1 江苏大学机械工程学院, 江苏 镇江 212013
2 浙江省水利水电装备表面工程技术研究重点实验室, 浙江 杭州 310012
近年来碳纤维复合材料(CFRP)由于性能优异, 受到工业领域广泛关注。 采用激光清洗技术预处理碳纤维复合材料表面的污染物和环氧树脂等杂质, 有利于改善碳纤维复合材料表面性能, 提高碳纤维复合材料胶接界面的结合强度。 在线检测激光清洗过程, 实时判断碳纤维复合材料的表面清洗质量, 是保证激光清洗效果的关键环节, 也是激光清洗装置自动化、 集成化的核心技术。 激光诱导等离子体光谱技术可以快速分析材料表面元素变化, 实现在线检测激光清洗表面状态, 在激光清洗领域有很广的应用前景。 采用Nd∶YAG高能量脉冲激光器产生的1 064 nm激光在空气环境中诱导产生等离子体, 利用改进型光栅光谱仪(ME5000)获取等离子体光谱, 在线检测激光清洗碳纤维复合材料。 研究外界空气环境对等离子体光谱检测结果的影响, 发现350~700 nm波段的元素谱线可用于碳纤维复合材料表面物质成分分析; 采用电子扫描显微镜观测的激光清洗表面形貌和X射线电子能谱仪测得的元素变化共同表征等离子体光谱检测的有效性, 通过采集不同激光能量以及不同作用次数的等离子体光谱图, 获得碳纤维复合材料表层树脂物质通过激光单次清洗干净的阈值, 研究激光清洗质量与激光诱导等离子体谱线成分及其强度变化的关系。 结果表明: 在获取的激光诱导等离子体光谱中, 光谱图中谱线波长在393.3 nm的S(Ⅱ)和589.5 nm的S(Ⅱ)谱线可有效在线表征碳纤维复合材料表面清洗质量; 激光单次去除干净表面环氧树脂的阈值为10.68 mJ; 低激光能量时需要清洗多次可以去除干净表面树脂; 高激光能量时清洗单次可使表面树脂去除干净, 多次清洗易造成基体损伤。 实验结果为激光清洗碳纤维复合材料的智能集成化应用提供工艺依据和技术支持。
等离子体光谱 碳纤维复合材料 在线检测 激光清洗 纳秒脉冲 Plasma spectroscopy Carbon fiber reinforced polymer On-line detection Laser cleaning Nanosecond laser pulse 光谱学与光谱分析
2019, 39(8): 2388
Author Affiliations
Abstract
1 Key Laboratory of Adaptive Optics, Chinese Academy of Sciences, Chengdu 610209, China
2 Institute of Optics and Electronics, Chinese Academy of Sciences, Chengdu 610209, China
3 University of Chinese Academy of Sciences, Beijing 100049, China
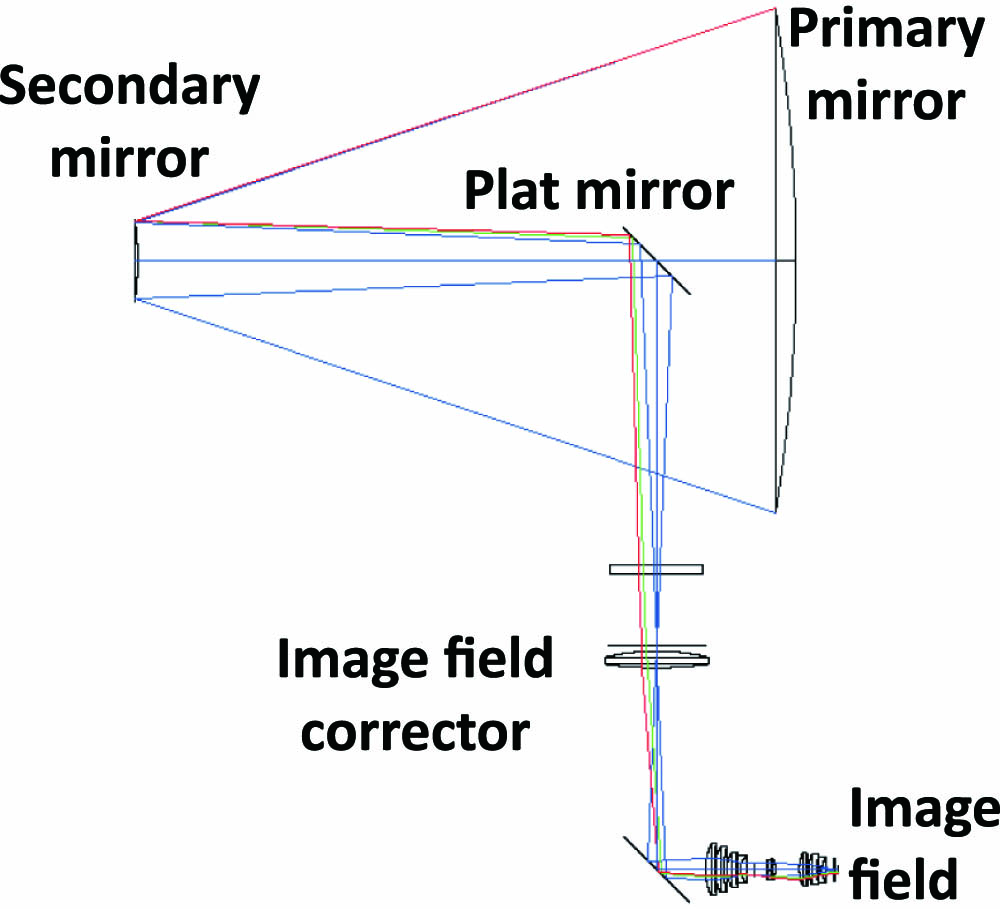
The precise alignment of a high-performance telescope is a key factor to ensure the imaging quality. However, for telescopes with a wide field of view, the images are sometimes under-sampled. To study the effects of under-sampled images on the precision of telescope alignment, numerical simulations are implemented with the stochastic parallel gradient descent algorithm. The results show that the alignment program can converge stably and quickly. However, with the reduction of the full width at half-maximum of images, the relative residual errors increase from 9.5% to 19.5%, and the wavefront errors raise from 0.0972λ to 0.1074λ, indicating that the accuracy of the alignment decreases.
110.6770 Telescopes 120.4820 Optical systems 220.1140 Alignment 220.1080 Active or adoptive optics Chinese Optics Letters
2019, 17(6): 061101
1 江苏大学机械工程学院, 江苏 镇江 212013
2 江苏科技大学材料科学与工程学院, 江苏 镇江 212013
3 浙江省水利水电装备表面工程技术研究重点实验室, 浙江 杭州 310012
为提高6061铝合金的焊缝质量,采用纳秒脉冲激光预处理6061铝合金表面,利用扫描电子显微镜观察其表面形貌,研究了不同激光参数下氧元素的线、面含量及分布;为了验证清洗效果,进行了焊接实验。结果表明:最优的激光预处理参数为:激光功率15 W,清洗5次。在最优的加工参数下,表面氧元素的质量分数为3.23%,氧主要分布在光斑搭接处,铝合金焊缝平滑均匀,无明显的缺陷存在;激光预处理后,铝合金表面的氧元素含量越低,焊缝质量越高;分布于光斑周围的少量氧元素不影响焊接效果。
激光技术 激光清洗 面能谱 焊缝质量 6061铝合金 氧化膜
1 中国科学院光电技术研究所自适应光学重点实验室, 四川 成都 610209
2 中国科学院大学, 北京 100049
为保证大口径望远镜主镜在加工、镀膜和装调过程中的径向公差要求, 提出一种基于图像处理的实时检测大口径望远镜主镜径向偏心误差的方法, 利用光学成像系统对沿轴线运动的主镜的内孔和固定于主镜支撑结构底座的参考孔进行成像, 通过边缘提取和质心算法计算主镜相对于支撑结构的径向偏心误差。经实验验证, 该方法可实现对主镜径向偏心误差的实时测量, 且测量精度满足主镜的径向公差要求。
成像系统 大口径望远镜主镜 径向偏心误差 质心算法 激光与光电子学进展
2017, 54(9): 091103
1 中国科学院光电技术研究所, 四川 成都 610209
2 中国科学院大学, 北京 100049
3 中国科学院自适应光学重点实验室, 四川 成都 610209
在反射式望远镜系统误差校正过程中,常以点目标的清晰度函数作为成像质量的评价指标。通过优化算法对存在误差的参量进行校正,使清晰度函数达到极值。平均半径作为点目标成像的清晰度函数由于具有适用范围大、动态特性好的特点而得到广泛的应用。然而,在实际工作过程中,由于探测器噪声等因素的影响,平均半径计算值与理论值存在一定的偏差,从而对校正过程产生影响。对噪声下平均半径的计算误差以及阈值对误差的影响进行了理论和仿真分析,结果表明存在最优阈值使计算误差达到最小,并对不同噪声强度下仿真的最优阈值数据进行拟合,给出了最优阈值拟合公式,分析表明该公式能够较准确的计算最优阈值。
成像系统 远场光斑 平均半径 噪声 阈值









